前言
不会吧,不会吧,我又参加飞卡了?
基础四轮组规则
车模:B车模,车模宽度不超过25厘米,高度不超过20厘米,长度没有限制,如果安装摄像头传感器,摄像头镜片中心的高度距离地面不超过10厘米
MCU:指定使用 Infineon系列单片机,允许使用各类电磁、红外光电、摄像头、激光、超声传感器
赛道元素:进出库、三岔路口(进出口120°,路口间直线距离<3m)、环岛(R<0.5m)、坡道(坡度<=20°)、十字路口(需直行)、弯道(曲率半径<0.5m)
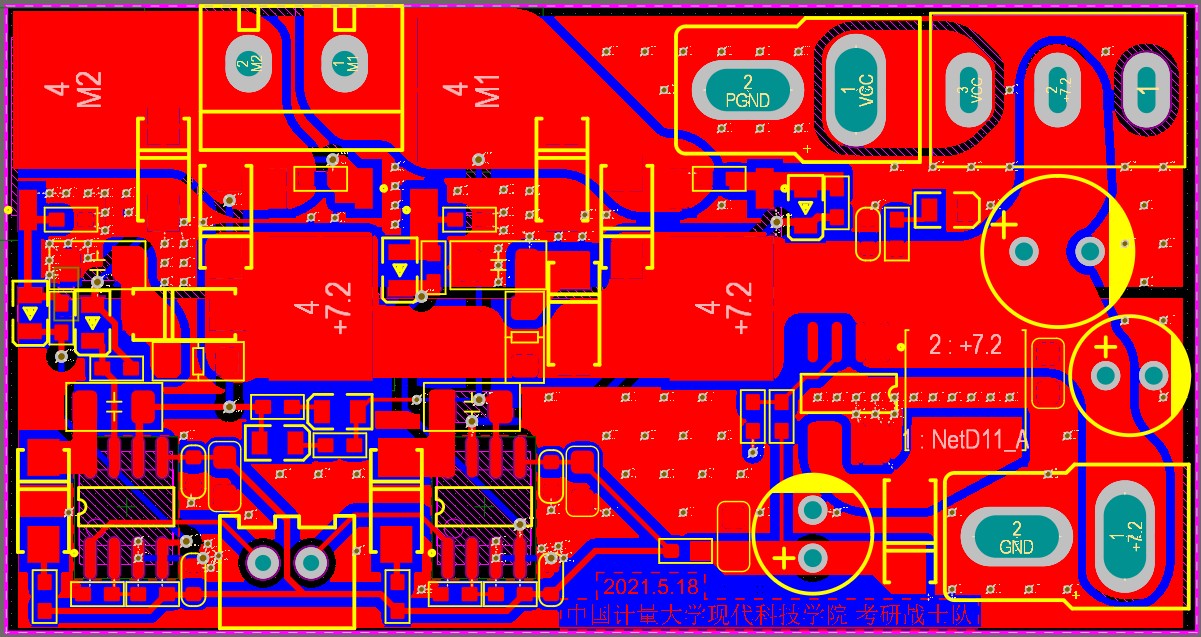
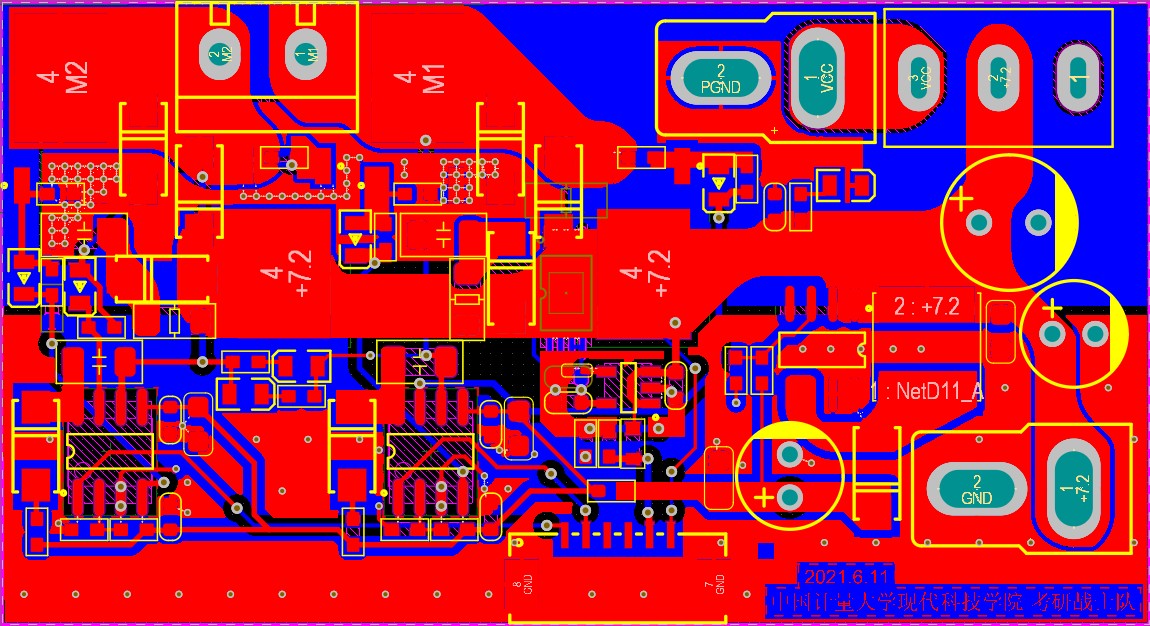
电机驱动
IR2184老方案,B车电机比较猛,可能有11.7A,试一下加RDC释放电路来提高刹车性能
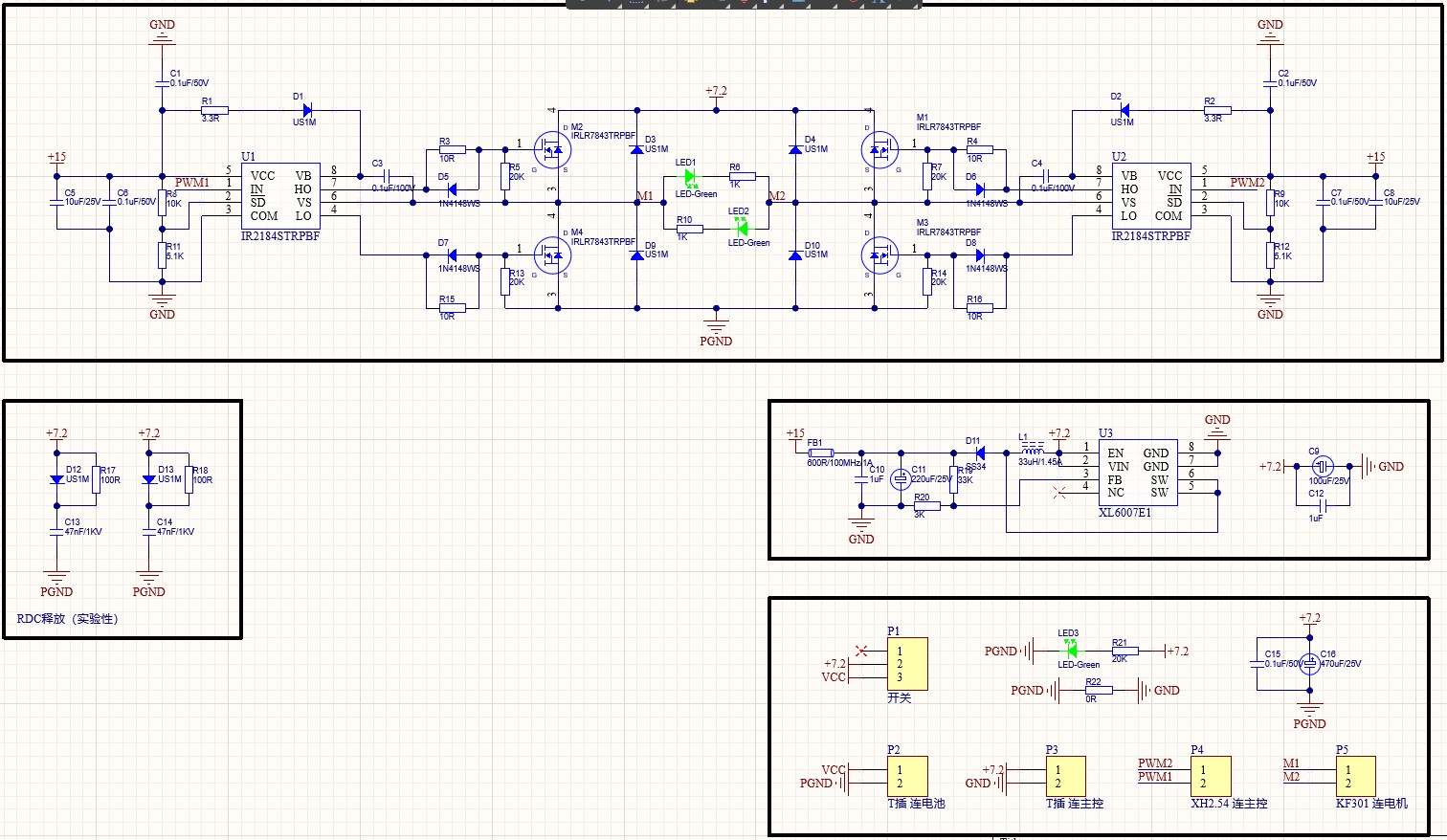
- 电机驱动加上ina240测电机电流(21.6.11前)
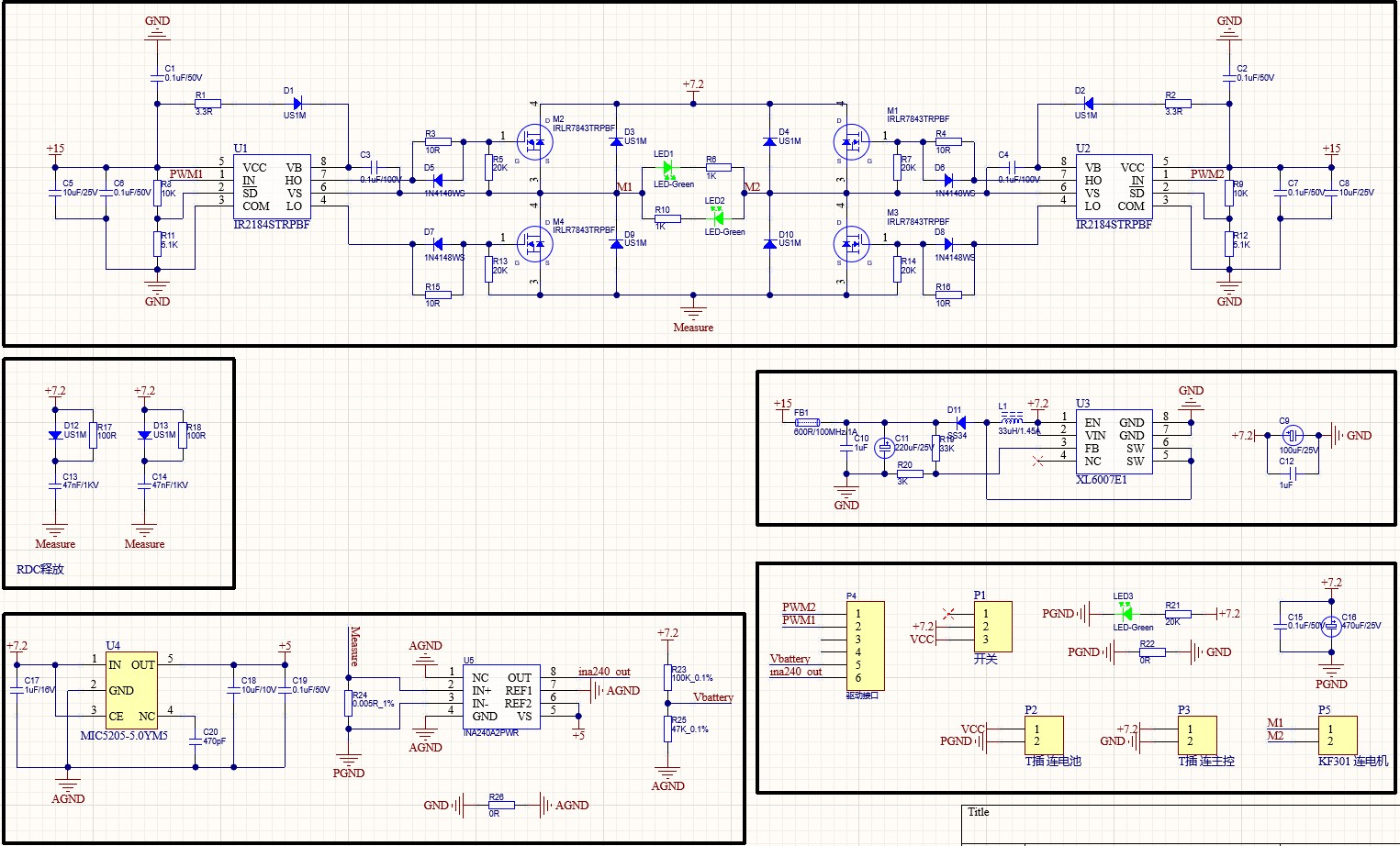
(21.6.11)程序员通过电机反转来刹车,未加驱动死区时间,导致锂电池保护板保护。
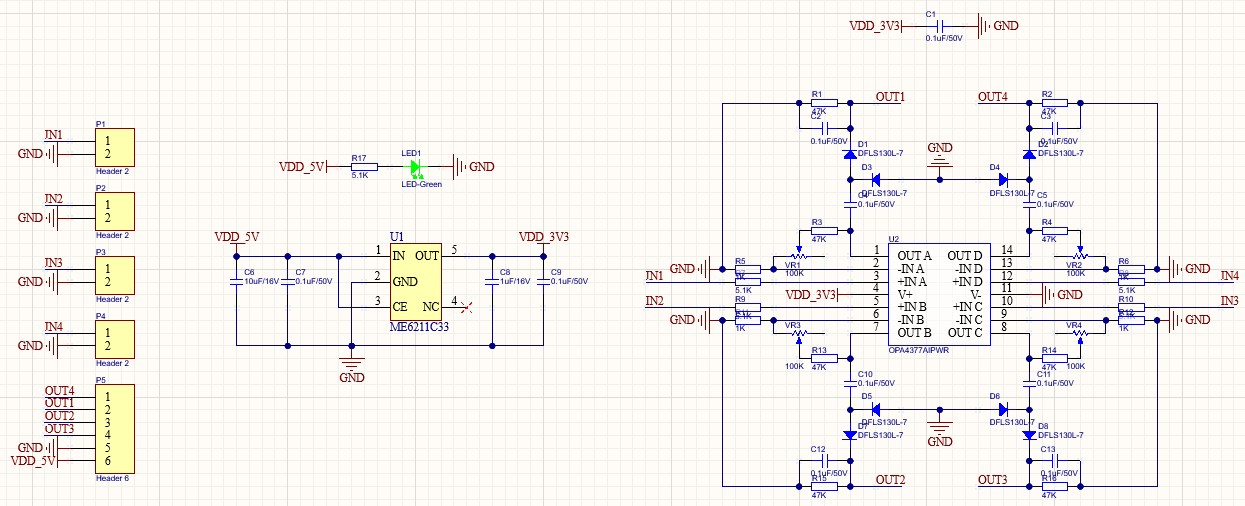
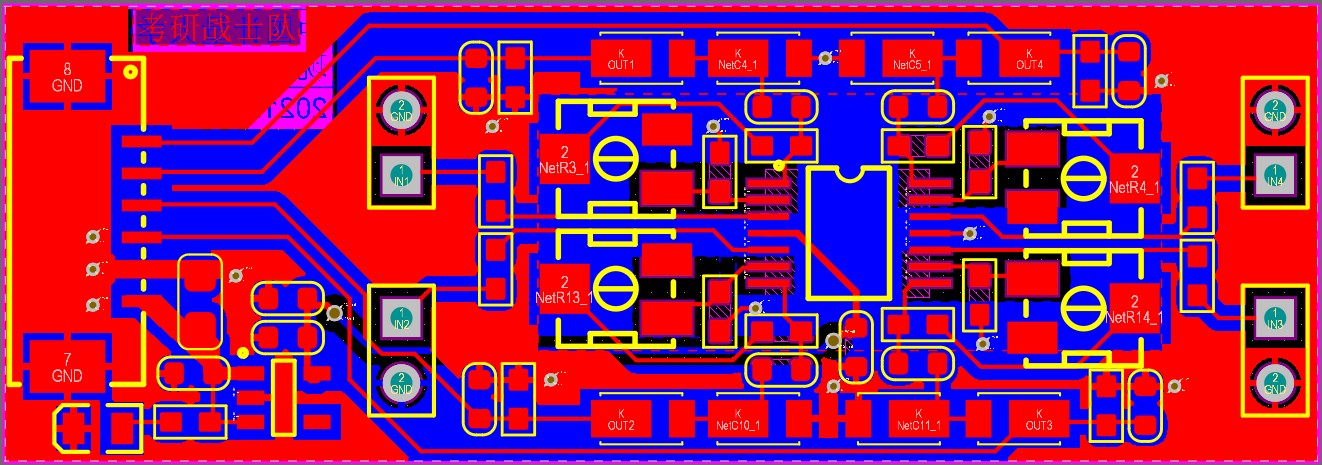
电磁运放
采用逐飞方案,opa4377,单端放大,检波,二极管使用了压降小的肖特基二极管
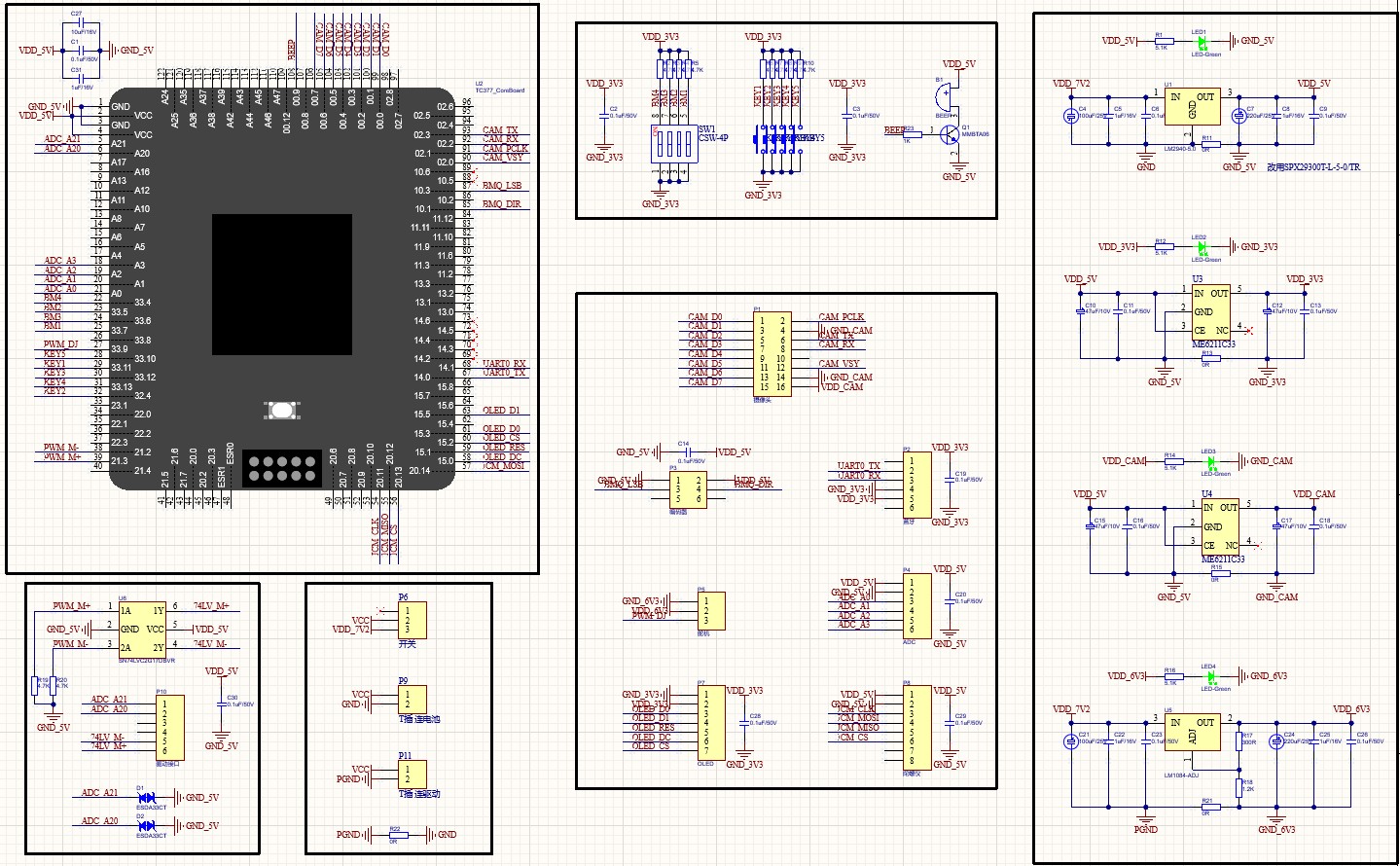
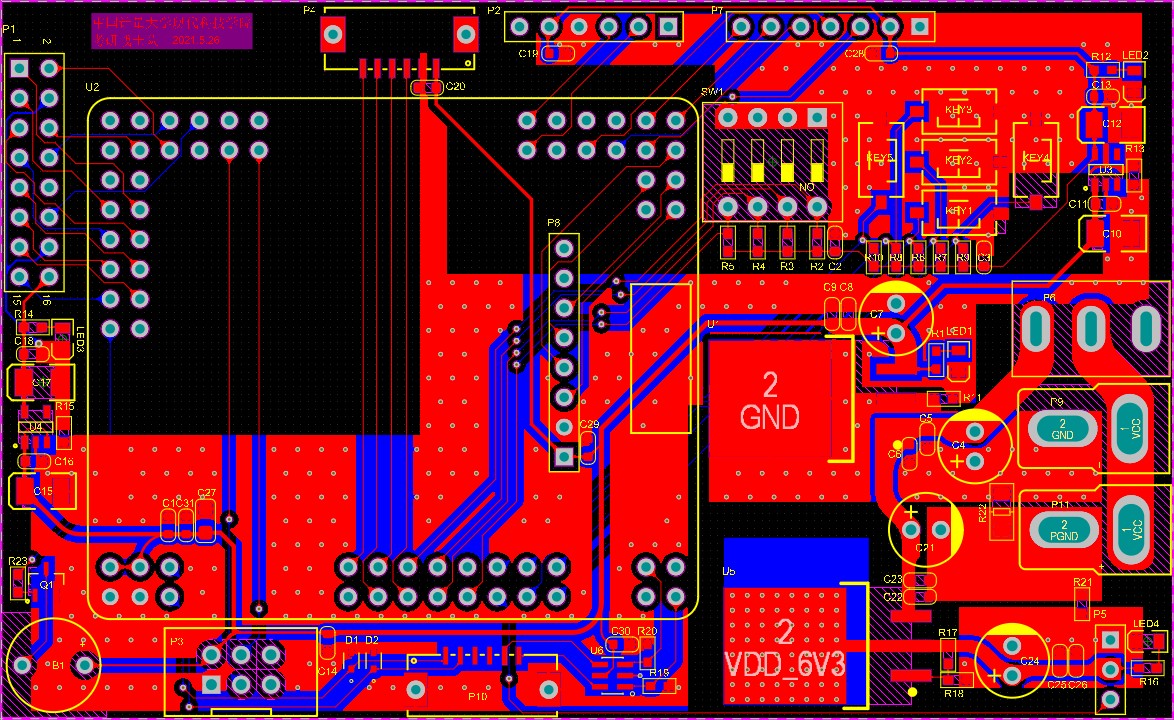
tc377主控
考虑到DC-DC负载响应速率不如LDO,继续使用LM1084-ADJ给舵机供6.3v电